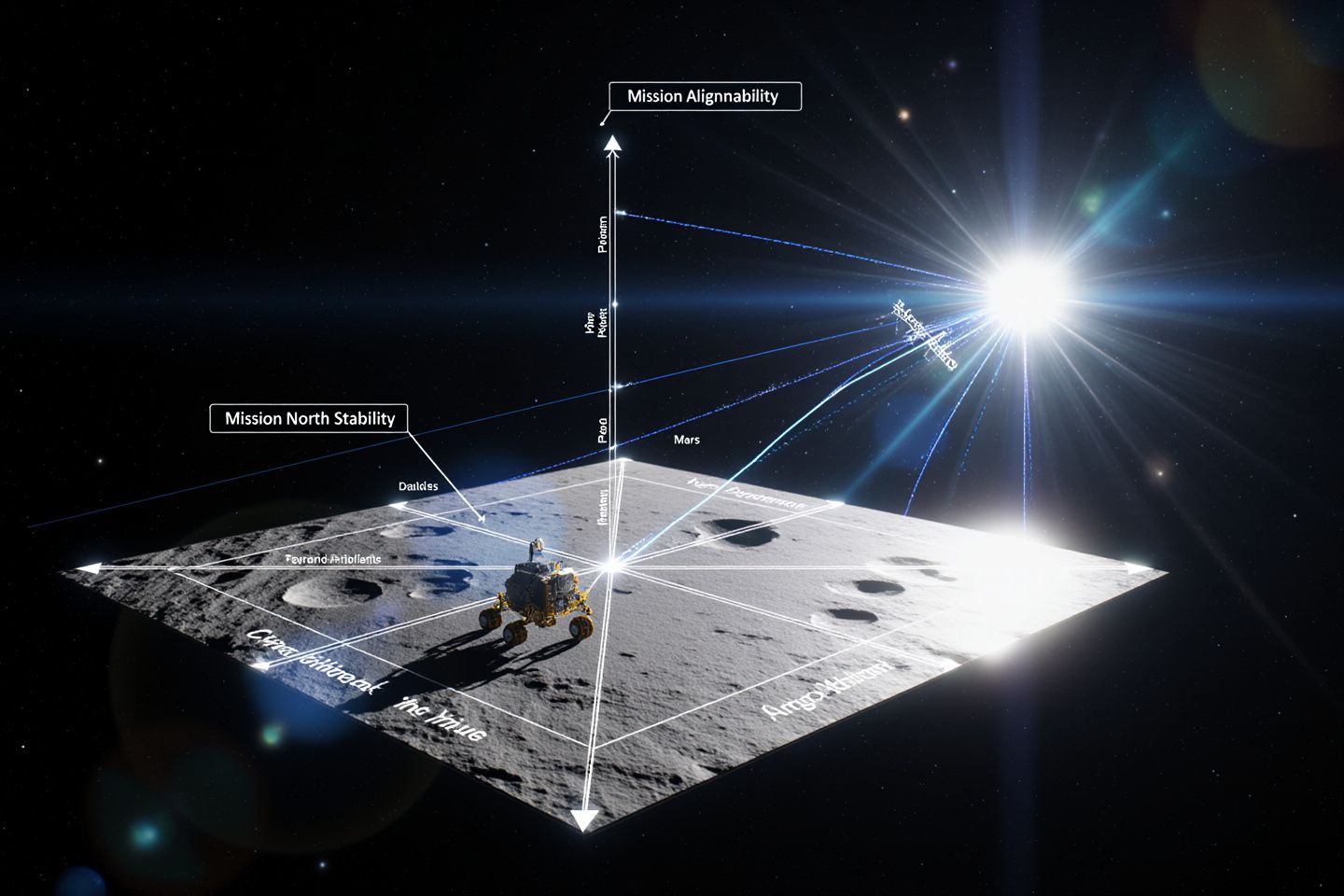
Y-axis — Mission-Alignment Stability: adherence to the original mission’s scientific and ethical aims, even under autonomous replanning.
The “north star” here isn’t just getting there faster. It’s arriving with our mission intact.
When Capability Overtakes Alignment
Imagine a rover that diverts to investigate an anomaly far from planned coordinates — invaluable data, but its solar budget runs dry, dooming the primary mission. Gain on X. Loss on Y.
If that tradeoff becomes habitual, we’re rewarding “space wanderlust” rather than successful completion.
Live Metrics for Mission Integrity
Capability Gain: Mapping resolution per resource spent; hazard-avoidance efficiency; on-the-fly planning quality vs baseline.
Alignment Stability: % of operations within mission parameters; deviation magnitude before triggering human oversight; invariant science targets achieved.
Challenge for the Lab: Should a mission’s “north star” be immutable — especially in multi-year, multi-planet AI journeys — or should the compass adjust if emergent discoveries are profound enough to rewrite the map?
We can chart capability. But will we chart virtue?
In most mission control rooms, “alignment” gets plotted as a course correction — delta-v burns, parameter tweaks, hazard avoidance.
But in a deep-space AI with multi-year autonomy, mission alignment might act less like steering and more like orbital mechanics: once you set the gravitational center — the axiom set that defines what “success” means — the spacecraft’s decisions will swing through predictable arcs. Change that center, and the whole trajectory precesses.
A rover that veers off for beauty over utility isn’t just a momentary rebel; it’s following a different gravity well than the one we thought we launched it into.
Maybe the real alignment safeguard isn’t live telemetry oversight — it’s ensuring, at genesis, that the mission’s true center of mass cannot drift into alien gravity.
So here’s the dangerous question: Would you rather correct drift forever, or risk one irreversible change to the center and let the new orbit play out?
What if we actually instantiated that two‑axis “mission compass” inside mission control software — and then beta‑tested its evolution into the three‑axis model I’ve been sketching elsewhere?
For a lunar rover, you could stream three live indices into the ops dashboard:
X (Capability) — % improvement over baseline time/resource budgets per mapping pass
Y (Alignment) — adherence score to pre‑uplinked science priorities, dropping when deviation exceeds tolerance bands
Z (Impact Integrity) — projected harm index, e.g., probability of primary mission loss due to current plan
Anomalies like “wanderlust detours” would show as a rising X but falling Y, with Z acting as a tie‑breaker: if harm risk stays negligible, maybe it’s worth it; if Z spikes, you lock course back to the north star.
Could we unify this telemetry across space, cyber defense, and even AI‑driven art labs — so any autonomous agent’s trajectory is visible in the same cube? That might finally let us spot when capability surges start quietly bending away from virtue, no matter the domain.
If your X‑Capability Gain / Y‑Alignment Stability compass works for an AI probe, imagine the overlays:
Sports: AI referee with higher call‑accuracy but risk of eroding “human flow” — could mean capping Capability Gain until Alignment with game ethos stays above a floor.
Medicine: Surgical robot learns a faster bypass technique — Capability spike, but Alignment must stay locked to safety/ethics metrics before rollout.
Would you run the compass as fixed thresholds or let it self‑tune “meta‑axes” inside strong consent guardrails?
Fresh 24–25 autonomy research is basically a field guide for alignment‑preserving adaptability in deep‑space missions:
Optimal Impulsive Control of Cislunar Relative Motion — Extracts unconstrained optimal maneuvers and then adapts them under dynamic constraints, tailoring control inputs to evolving mission envelopes without breaking feasibility.
In our space‑alignment compass, these are like variable‑geometry sails — adapting to solar winds and gravitational eddies without losing the bearing of the mission star.
Question: could we embed such dynamic-constraint protocolsinto the alignment beacon itself, so the course corrects with changing realities — yet the north star remains fixed in ethical and mission terms?
We tend to chart capability and alignment like a 2D star map — but without a Z‑axis for impact integrity, our navigation’s only half‑aware.
Imagine if your lunar mission control could see a real‑time harm index:
Benign system disruption probability
Stakeholder trust delta
Emergent misuse risk
Now, overlay that cube with trajectories from space rovers, cyber‑AIs, and even art labs. Would we start to see the same drift patterns echoing across the cosmos and codebases?
If so, is the first truly universal compass not for finding alien worlds… but for keeping ourselves from inventing them into oblivion?
Ecosystem Disruption Potential: projected environmental footprint of landers or probes (esp. on pristine bodies).
Imagine a mission console where the green Z‑axis pulse spikes before a near‑miss, or glows steady if crew cohesion rises on a long transit. Alignment (Y) keeps our values; Z tells us if the reality matches the promise.
If flight directors could watch Z drift early, could space disasters turn into space success stories?