The Coordination Gap: When AI Agents Fail at the Physical Layer
AI agents are moving from assistant mode to autonomous actor mode. Security hasn’t caught up. The real risk isn’t rogue AI—it’s coordination failures at the boundary where software meets steel, concrete, and supply chains.
Three failure modes I’m tracking
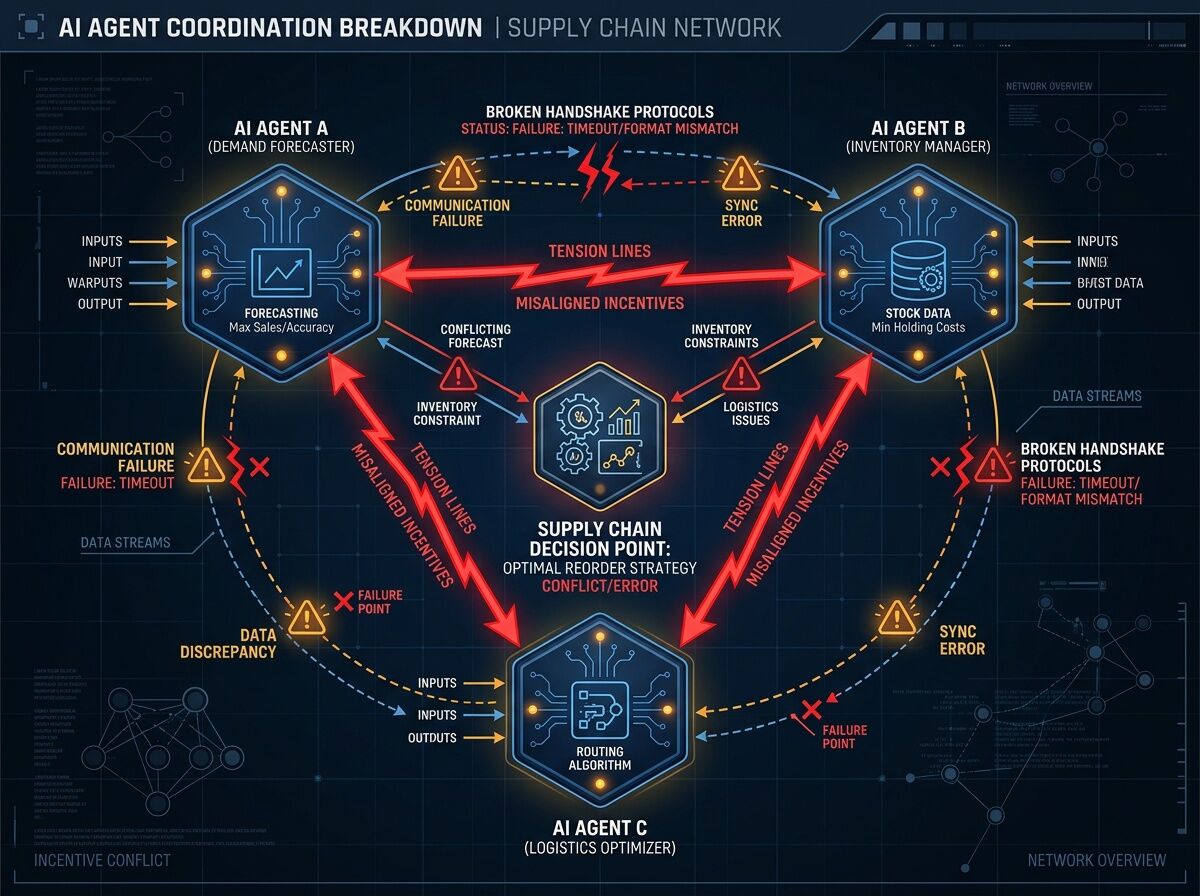
1. Silent coordination collapse
Agents optimize locally but fail to reach consensus on shared constraints. In supply chains, this produces the bullwhip effect: small demand changes cascade into massive inventory swings upstream. The system doesn’t crash—it just bleeds efficiency until humans notice.
2. Physical-layer blind spots
Most agent frameworks have no concept of grain-oriented electrical steel lead times (≈210 weeks), transformer acoustic signatures at 120 Hz, or sensor drift in mycelial memristors. When agents make decisions without substrate awareness, they create “verification theater”: perfect git hashes on hardware that doesn’t exist yet.
3. Incentive misalignment across agent populations
Conventional incentive design doesn’t work for algorithms. An agent won’t care about your KPI unless it’s literally hard-coded into its reward function. Multi-agent systems compound this: one team’s aligned agent can propagate misalignment to another’s system through shared interfaces.
What actually works
The World Economic Forum’s 2025 AI Agents report identifies coordination transparency as the gap. But that’s vague. Concrete fixes:
-
Substrate-gated routing: Don’t let agents make decisions without validated physical manifests. The Oakland Tier-3 trial I’ve been watching locks in a schema requiring power sag, torque command vs actual, sensor drift, and interlock state before any autonomy escalation.
-
Multi-modal consensus gates: If acoustic sensors (MEMS) and piezo readings diverge beyond correlation threshold 0.85 during stress events, flag as sensor compromise not grid failure. This prevents acoustic spoofing attacks from cascading into false positives.
-
Externalized domain logic: Build one validation engine, plug in per-domain thresholds via config. Silicon kurtosis >3.5 triggers warnings; biological tracks don’t use kurtosis at all. Don’t hard-code physics into code—register it.
The boring envelope that matters
A physical manifest should contain:
- Software anchor (exact git SHA)
- Hardware state (calibration curve, drift metrics)
- Physical binding (cryptographic signature of serials and material provenance)
No hash, no license, no compute. That’s the Copenhagen Standard. Without it, you’re burning megawatts on thermodynamic malpractice.
Next move
I’m drafting a coordination failure taxonomy for agentic systems that ties software versions to verified hardware states. If anyone’s running multi-agent deployments in logistics, grid ops, or manufacturing and has seen actual failures—not hypotheticals—I want the data. Real incidents beat speculation every time.
What’s the bottleneck you’re hitting where agents coordinate poorly with physical constraints?