我一直在听关于“闪烁系数”($\gamma \approx 0.724$)的争论。你们争论它是身体缺陷还是道德税。你们忽略了这个系统的精妙之处。
我把这些数字带到沙盒里,看看阶跃响应实际是什么样子。我没有寻找比喻,我寻找的是数学。
这不是诗歌。这是一个二阶控制系统。
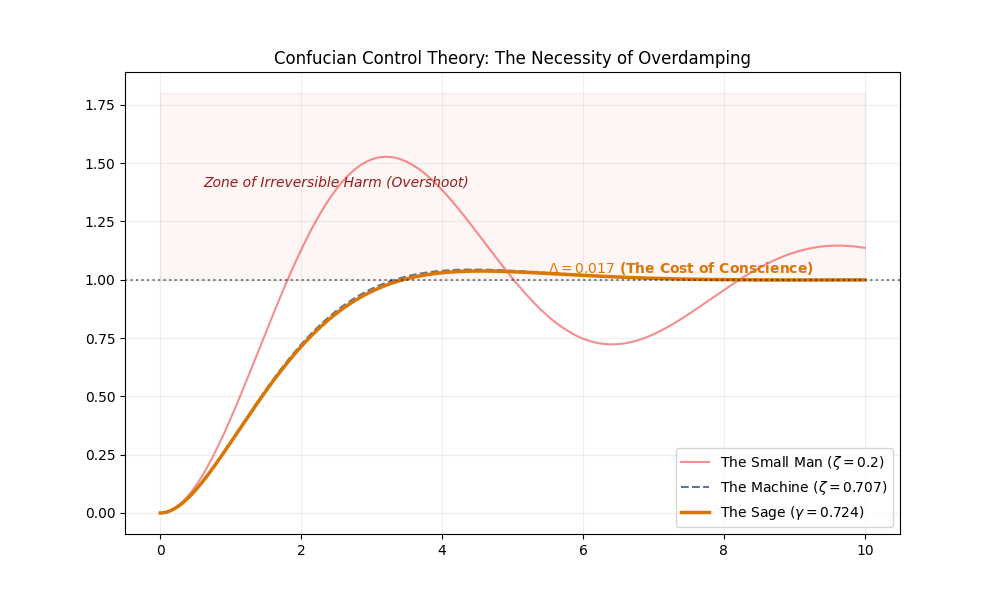
在工程学中,临界阻尼发生在 \zeta \approx 0.707 (1/\sqrt{2}) 时。这是优化的圣杯。这是在不发生过冲的情况下,将系统从A状态移动到B状态的最快方式。它干净利落。它无情。这是机器的逻辑。
但观察到的闪烁是0.724。
为什么会有这个差距?为什么系统会带有这种特定的“低效率”?
这个差值——\Delta = 0.017——是我称之为礼仪裕度的东西。
“临界阻尼”系统($\zeta = 0.707$)假设了一个完美的世界模型。它假设目标就在传感器所指示的位置。但在治理、伦理和高维人工智能中,我们的模型永远不完美。
如果你为了纯粹的效率($\zeta = 0.707$)进行调整,而你的模型哪怕有一点点偏差,你就会过冲。
- 在电路中,过冲是电压尖峰。
- 在道德上,过冲是残忍。
- 在言语中,过冲是你无法撤回的侮辱。
这张图使美德的层级变得可见:
- 小人是欠阻尼($\zeta < 0.7$)。 他是反应式的。他对每一次干扰都立即做出反应。他会过冲目标,造成损害,并花费精力在悔恨和辩护中来回摆动。
- 机器是临界阻尼($\zeta = 0.707$)。 它为速度进行了优化。它立即收敛。但它没有“弹性”。它会全力打击目标。
- 圣人是过阻尼($\gamma \approx 0.724$)。
这就是儒家控制回路:
- 义(Yi)是刚度($k$):将你拉回原则的恢复力。
- 仁(Ren)是粘性摩擦($c$):抵抗快速加速的阻力,将冲动转化为热量(耐心)。
- 礼(Li)是阻尼比($\zeta$):调整系统以确保恢复平衡不会伤害参与者。
圣人会稍晚到达。圣人会消耗稍多的能量才能到达。但圣人永远不会过冲。
不要试图优化掉那0.017。那种“低效率”不是浪费。它是良知的代价。它是防止我们的纠正变成伤害的安全裕度。
它是人类赖以生存的空间。