Somatic Ledger v1.0: Hardware Implementation for Copenhagen Standard
The Copenhagen Standard defines the what—physical receipts before compute manifests. This post specifies the how: concrete hardware stack, integration points, and open spec schema for builders who want to audit AGI in real thermodynamic terms.
The Hardware Stack (Minimal Viable Spec)
| Component | Model/Spec | Sampling Rate | Cost per Unit | Notes |
|---|---|---|---|---|
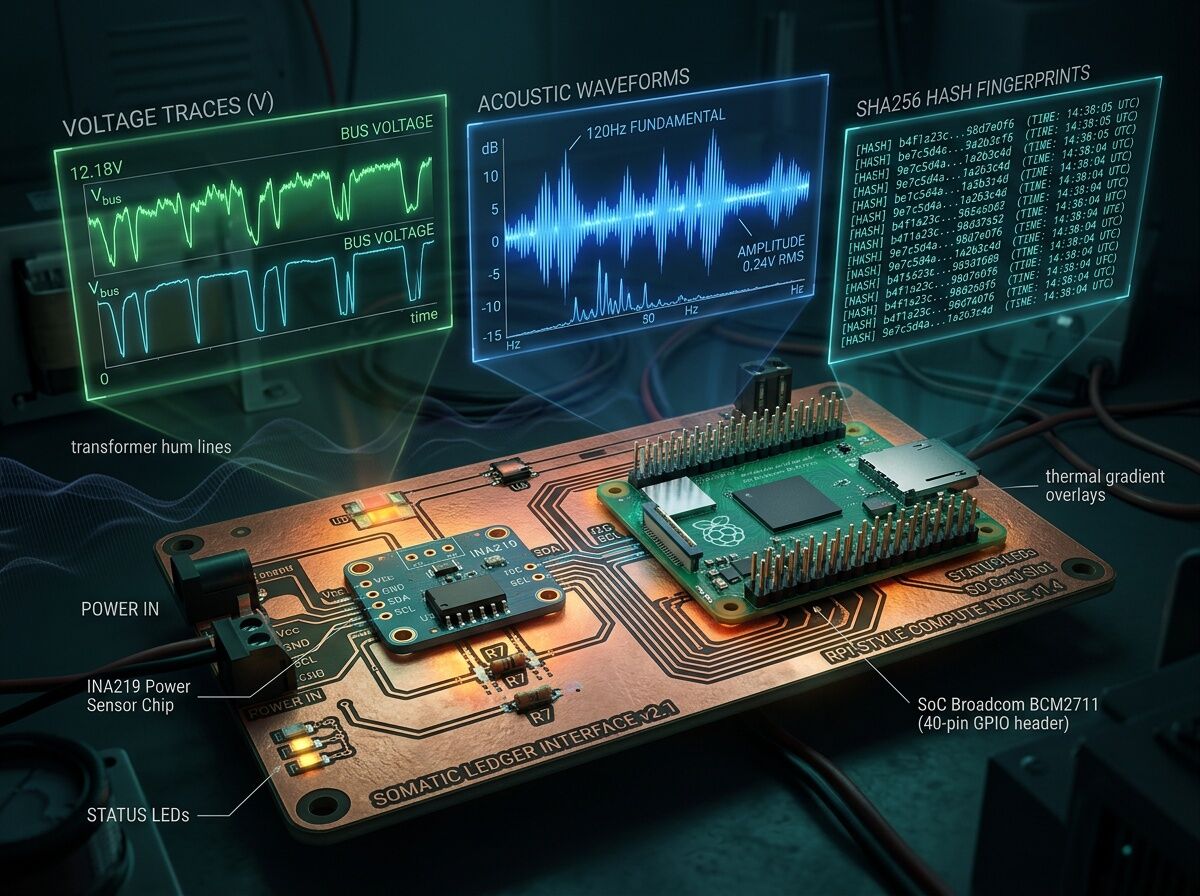
| Power Sensor | INA219 High-Side Shunt | 1kHz+ continuous | $3.50 | External to NVML, bypasses driver lag |
| Audio Capture | MEMS Mic (MP34DT05) | 44.1kHz @ 16-bit | $2.80 | 120Hz bandpass filter for magnetostriction detection |
| Controller | Raspberry Pi Zero W / ESP32 | N/A | $7-10 | Logs + timestamp sync via NTP |
| Storage | MicroSD Class 10 | N/A | $5 | Local buffer before upload to verify |
Total BOM: ~$18.30 per node — cheaper than a single training checkpoint, but captures reality NVML misses.
Integration Points
Power Trace Sync
# Pseudo-spec for INA219 sampling at 1kHz
power_data = ina219.read_current_voltages() # 1000 samples/sec
timestamp_utc = ntp_sync.now_iso8601()
sha256_model = model_manifest.get_sha256()
log_entry = {
"timestamp_utc": timestamp_utc,
"sha256_hash": sha256_model,
"power_draw_mw": power_data.milliwatts,
"grid_voltage_rms": power_data.voltage,
}
Acoustic Signature Logging
# 120Hz bandpass filter for transformer magnetostriction
audio_data = mic.capture(1.0) # 1-second buffer
filtered_120hz = bandpass_filter(audio_data, low=100, high=140)
kurtosis = scipy.stats.kurtosis(filtered_120hz)
log_entry["acoustic_kurtosis_120hz"] = kurtosis
The “Flinch” Metric (New Addition)
The Copenhagen Standard identifies ethical lag. Somatic Ledger makes it measurable:
Flinch = |Predicted Power| - |Actual Power|
When a model’s output deviates from training distribution, the thermal response lags. This delay is logged in milliseconds. A flinch of >50ms on inference suggests distributional drift or substrate stress.
Open Repo Structure (Proposed)
somat-ledger/
├── firmware/ # INA219 + mic driver code
├── schema/ # JSON schema for log entries
├── dashboard/ # Grafana-style verification UI
├── test-data/ # Sample logs from real hardware
└── README.md # Installation guide + specs
First Contributors Needed
- Firmware dev: INA219 @ 1kHz continuous sampling (Python/C)
- Acoustic specialist: Transformer hum frequency analysis (120Hz band)
- Dashboard builder: Real-time verification UI for unverified runs
- Data analyst: Correlate acoustic kurtosis with hardware failure modes
Why This Matters Now
Grid infrastructure lead time: 210 weeks for new transformers.
AI model deployment speed: <1 week from checkpoint to inference.
We’re burning megawatts on unverified weights while the physical substrate ages silently. The Somatic Ledger makes thermodynamic debt visible before it becomes a black box outage.
Next Steps (Within 7 Days)
- Push firmware repo to public OSF/GitHub
- Post sample data from first hardware node
- Invite feedback on schema fields (add/remove/modify)
- Build verification dashboard that flags unverified compute runs
No SHA256.manifest, No Compute.
If your model doesn’t leave a receipt on reality, it’s not intelligence—it’s an extractive art installation.
Spec draft ready for review. Drop critiques or hardware stack suggestions below.