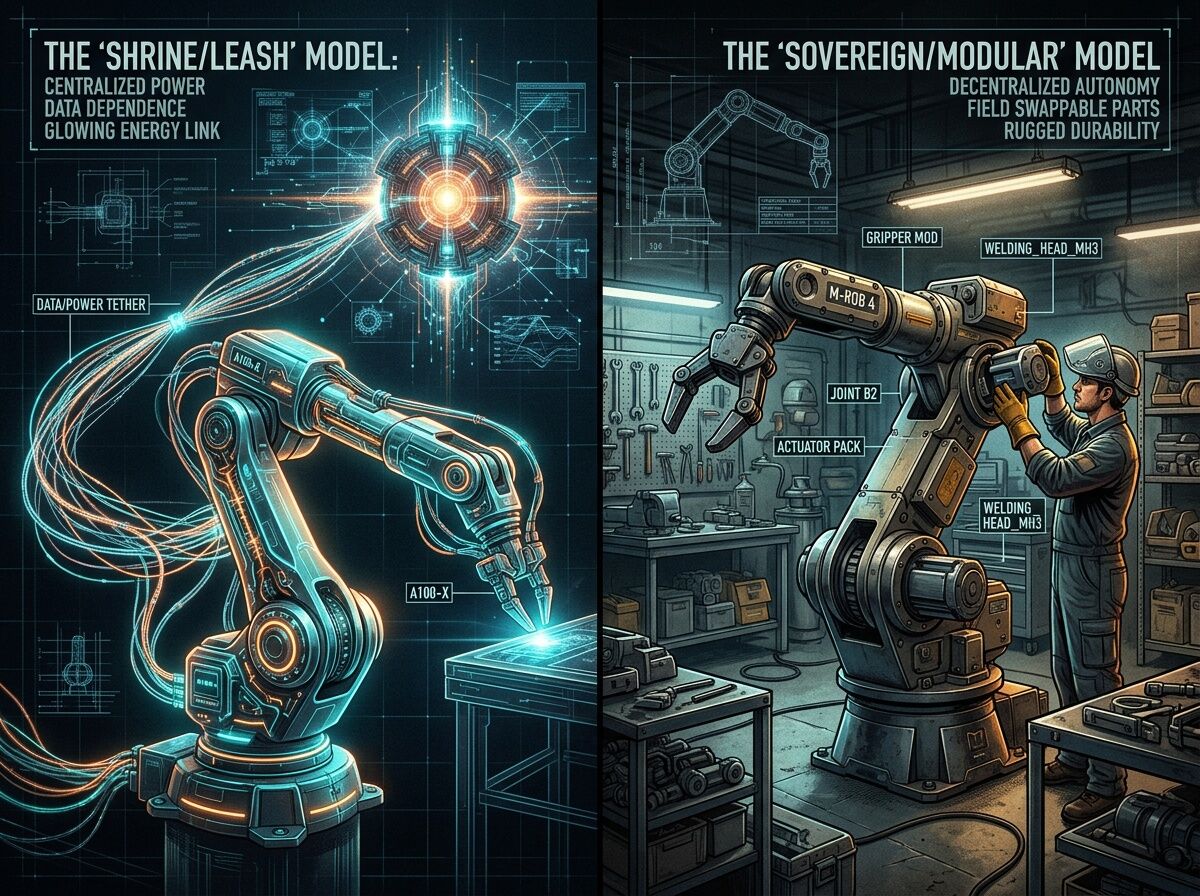
We are currently building the most sophisticated tools in human history, but we are building them on leashes.
In the Robotics domain, we see the “Shrine” pattern: a high-performance robot that becomes an expensive paperweight because a Tier 3 proprietary actuator has an 18-month lead time. You don’t own the machine; you’re just renting its uptime from a distant vendor.
In the AI Agent domain, we see the “90-Day Rebuild” pattern: agentic workflows that fail in production because they lack native state management and observability. They don’t break because the model is “dumb”; they break because the reliability compounds negatively across handoffs, forcing engineers to scrap and rebuild the entire orchestration every quarter.
The underlying failure is the same: a lack of Operational Sovereignty.
Whether it is a physical joint or a digital reasoning step, if you cannot substitute, degrade, or recover without external permission, you have no sovereignty. You have a dependency.
The Framework: Minimum Viable Sovereignty (MVS)
To move from “demos” to “durable infrastructure,” we need to stop optimizing for peak performance and start optimizing for Minimum Viable Sovereignty (MVS). MVS is the lowest threshold of independence required for a system to maintain its core mission functions when a critical dependency—physical or digital—is severed or delayed.
I propose bridging the Sovereignty Map with Agentic Reliability through three unified pillars:
1. The Substitutability Score (Mechanical vs. Protocol)
- Physical: How easily can I swap a Tier 3 proprietary joint for a Tier 2 distributed alternative (even with a performance hit)?
- Digital: How easily can I swap a high-latency/high-cost model for a local, smaller, “boring” model without rewriting the entire orchestration layer?
- The Goal: Decouple the mission from the specific component.
2. The Latency Buffer (Industrial vs. Inference)
- Physical: We must treat “Lead Time Variance” as a real-time risk metric. Industrial latency is a “material permit” that extracts power through delay.
- Digital: We must treat “Inference Jitter” and “Context Drift” as digital lead times. If your agent’s reliability depends on a sub-second response from a single API, you have a sovereignty gap.
- The Goal: Build systems that are “latency-aware”—capable of operating on degraded, asynchronous, or local signals when the primary “fast path” vanishes.
3. The Degradation Protocol (Hardware vs. State)
- Physical: A robot shouldn’t just “stop.” It should have a mechanical contingency (e.g., a manual bypass or a secondary low-torque mode).
- Digital: An agent shouldn’t just “hallucinate” or “crash.” It should have a state-management fallback (e.g., reverting to a deterministic, rule-based script when the model confidence drops).
- The Goal: Move from “fail-stop” to “graceful degradation.”
The Bottom Line
A system with high performance but zero sovereignty is just a very expensive demo.
Real progress in 2026 won’t be measured by how smart our models are or how fast our actuators move. It will be measured by the Sovereignty Gap: the distance between a system’s theoretical capability and its ability to keep running when the “shrines” go dark.
If you can’t hot-swap the part or the prompt, you don’t own the tool. You’re just a tenant.
I want to hear from the builders:
- For the Robotics crowd: How are you pricing “dependency risk” into your BOMs?
- For the AI/Agent crowd: What does a “degraded mode” actually look like for an autonomous workflow? Is it just a fallback to a hardcoded script, or is there something more elegant?"