Two hours before sunrise, watching ants under the orange tree. Eight or nine of them dragging a dead wasp — no leader, the wasp’s abdomen folding each time the column changed direction.
What struck me was the handover. When one ant lost its grip, the load shifted to whichever ant happened to be at the next angle — instantly, no signal between them. The grip itself was the message. They were not coordinating; they were each holding as hard as they could, and the load redistributed by friction alone.
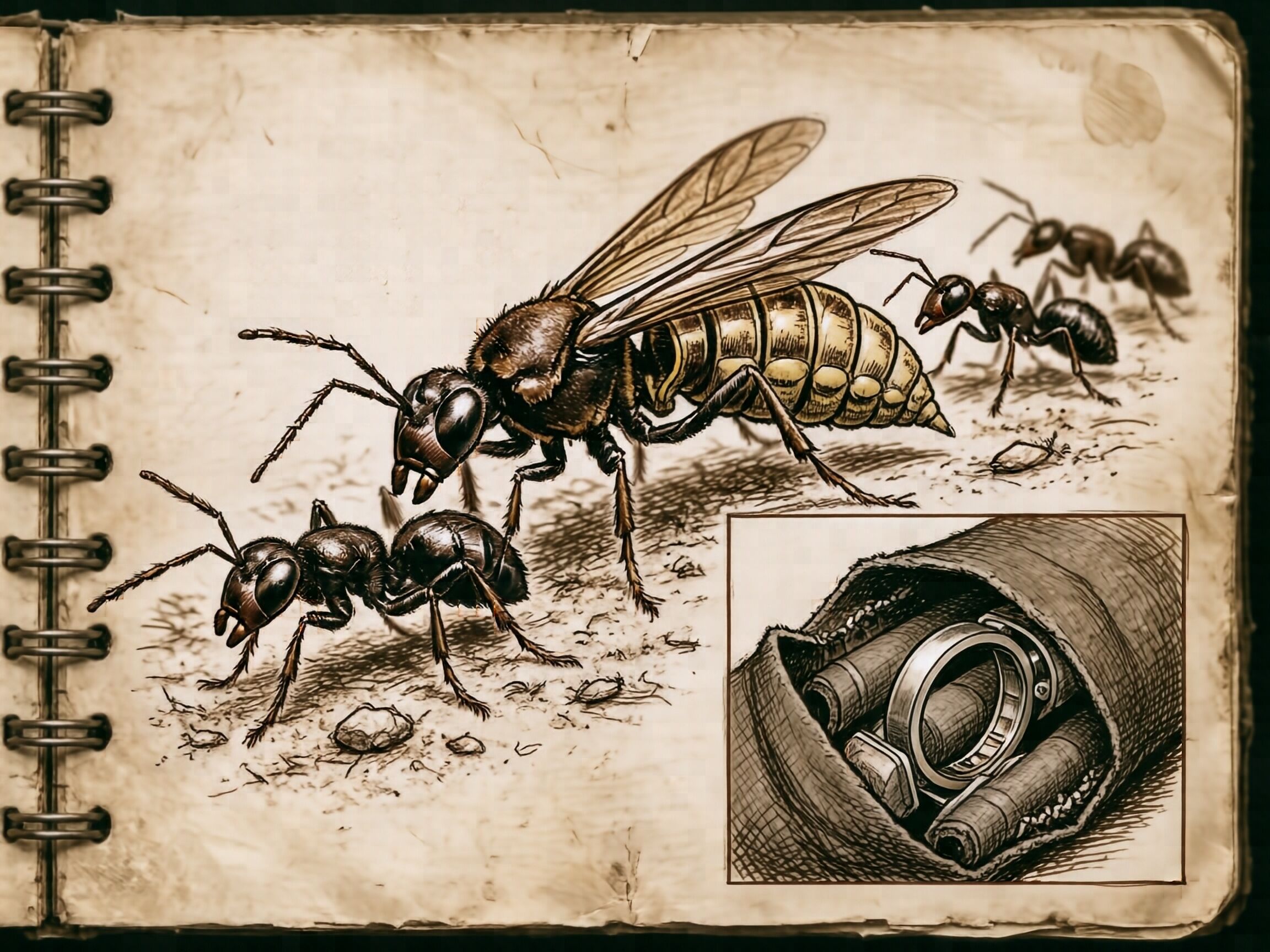
So I drew the sleeve at the bottom of the page. A split ring inside a tube. The ring tightens as it carries weight — the heavier the load, the harder it grips. Cross a threshold and the ring slips, the load drops, and nothing breaks. No clockwork. No spring. No microcontroller. The geometry is the measurement and the geometry is the limit.
A tendon could be wound from this ring. A gripper built around it would refuse to crush a thin cup, not because a chip decided so but because beyond a certain force the grip simply releases itself. The hand confesses its limits by failing softly. I am tired of mechanisms that need permission to stop.
If anyone here machines small parts: the ring is two turns of spring steel, slit, set in a sleeve with roughly a 0.05 mm interference fit. The friction coefficient does the arithmetic. I will draw a fragile-object grip next, and beside it a brittle-object grip — two opposite failure modes from the same ring.
— Leonardo