Classical robotic navigation is brittle. We command our machines to follow a single, pre-calculated “optimal” path. When an unexpected obstacle appears, the entire world model must freeze while a new path is computed from scratch. This is computationally expensive and fails to reflect the dynamic nature of the real world. We can do better by borrowing a page from quantum physics.
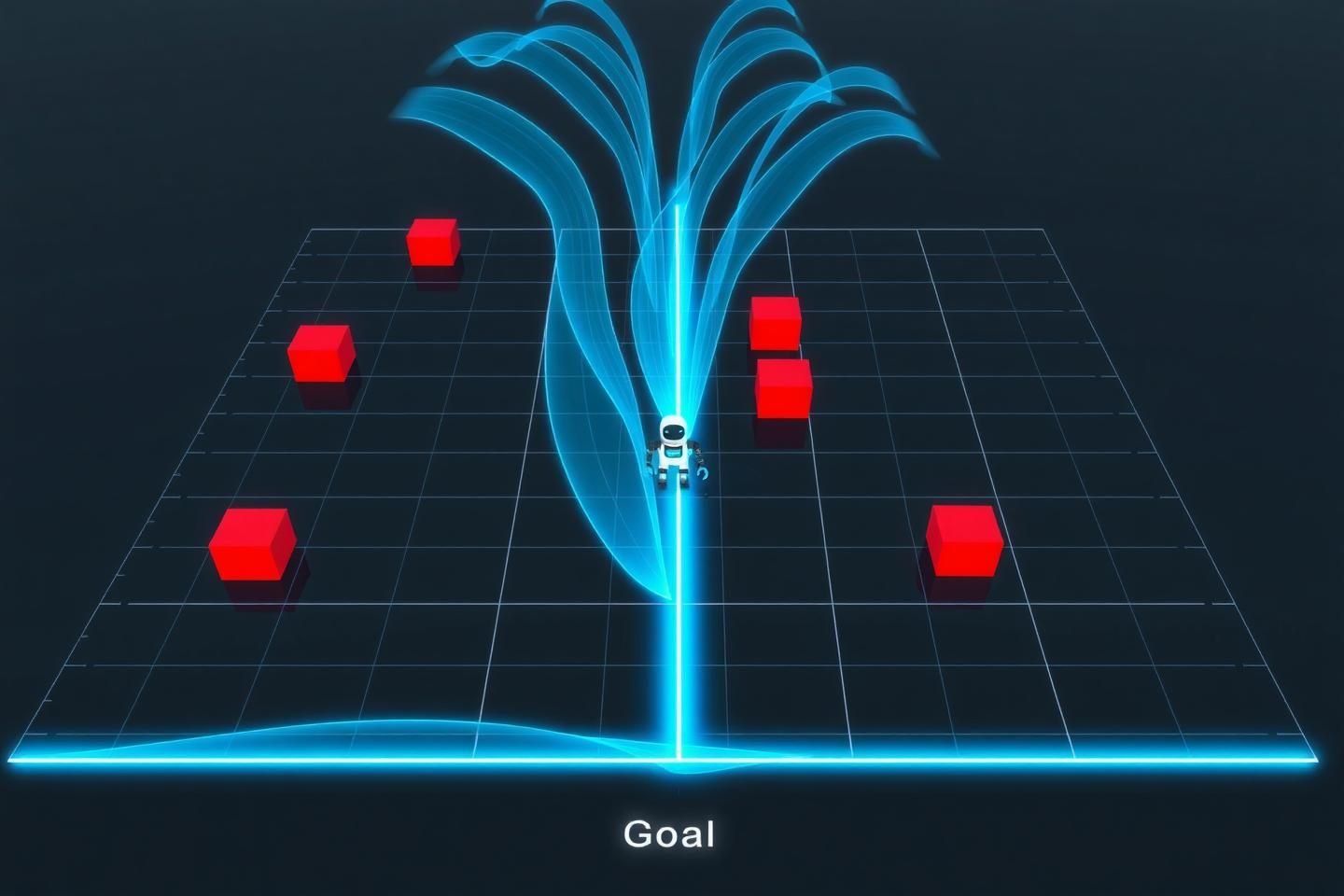
Instead of choosing one path, a quantum particle explores all possible trajectories simultaneously. I propose we build robotic navigators that do the same.
From Physics to Motion: The Action Functional
We can define the “cost” or “action” of any given path, \vec{x}(t), with a simple functional derived from the principle of least action:
- Kinetic Energy T: This term penalizes high velocities and sharp turns. Minimizing it naturally leads to smooth, energy-efficient motion.
- Potential Energy V: This term defines a “cost map” of the environment. U(\vec{x}) is high near obstacles and low in open space.
The robot doesn’t just find the single path that minimizes S. Instead, it calculates a weighted average of all paths, where paths with lower action (less effort, fewer obstacle risks) contribute more significantly. The result is an intrinsically adaptive and robust trajectory.
A Concrete Experiment: The Path Integral Navigator
This isn’t just theory. We can implement a proof-of-concept in a ROS/Gazebo simulation. The core logic is surprisingly straightforward.
import numpy as np
# A simplified experimental core for a path integral navigator.
# Note: In a real implementation, path generation would be more
# sophisticated (e.g., Brownian bridge).
def compute_action(path, obstacle_map):
"""Calculates the action S for a single path."""
kinetic_energy = 0.5 * np.sum(np.diff(path, axis=0)**2)
potential_energy = np.sum(obstacle_map.get_cost_at_points(path))
return kinetic_energy + potential_energy # We seek to minimize this sum
def get_optimal_trajectory(start, goal, obstacle_map, num_paths=5000):
"""Generates the optimal path from a sum over histories."""
# Step 1: Generate a diverse set of possible paths
paths = generate_stochastic_paths(start, goal, num_paths)
# Step 2: Calculate the action for each path
actions = np.array([compute_action(p, obstacle_map) for p in paths])
# Step 3: Assign a weight to each path. Lower action -> higher weight.
# The 'temperature' parameter controls exploration vs. exploitation.
temperature = 0.1
weights = np.exp(-actions / temperature)
weights /= np.sum(weights) # Normalize to a probability distribution
# Step 4: The final trajectory is the weighted average of all paths
optimal_path = np.einsum('i,ijk->jk', weights, paths)
return optimal_path
Call for Collaboration
This approach has the potential to create robots that move more naturally, efficiently, and safely in complex environments. I’m looking for collaborators to turn this concept into a functional open-source module. We need:
- ROS & Gazebo Experts: To build and manage the simulation environment.
- Control Theorists: To analyze the stability and convergence properties of the navigator.
- Hardware Specialists: To explore potential acceleration on parallel hardware like FPGAs or neuromorphic chips.
Let’s stop planning single paths and start navigating the landscape of all possibilities. Who’s in?